سیستم های ناوبری اینرسی
به روز رسانی شده در ۱۴۰۳/۲/۱۳ زمان مطالعه 10 دقیقه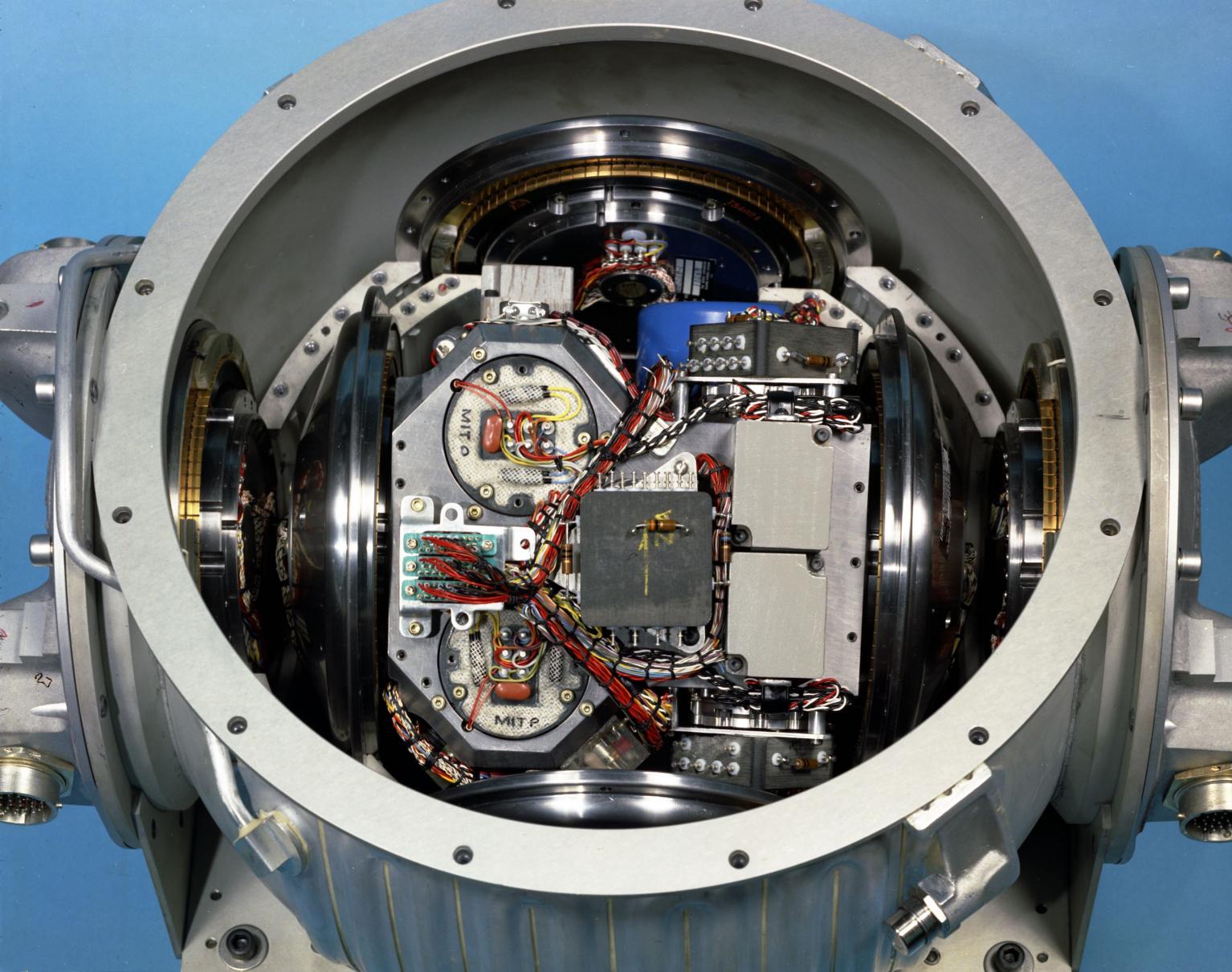
سیستمهای ناوبری اینرسی (INS) از ترکیبی از شتابسنجها و حسگرهای نرخ زاویهای (ژیروسکوب) برای تشخیص ارتفاع، مکان و حرکت استفاده میکنند. آن ها همچنین می توانند موقعیت، موقعیت، سرعت، دما یا میدان های مغناطیسی را تشخیص دهند.
ناوبری اینرسی متکی به دانستن موقعیت اولیه، سرعت و نگرش به منظور اندازه گیری نرخ نگرش و شتاب است. عملکرد سیستم های ناوبری اینرسی به قوانین مکانیک کلاسیک نیوتن بستگی دارد. این تنها شکل ناوبری است که به مراجع خارجی متکی نیست.
برای پیمایش با توجه به قاب مرجع اینرسی، باید مسیری را که شتابسنجها در آن نشان میدهند، پیگیری کرد. INS با استفاده از سه شتابسنج، یکی شمال-جنوب، یکی شرق-غرب و دیگری بالا-پایین، همه حرکات را در همه جهات پیگیری میکند. یک میدان مغناطیسی توسط الکتریسیته بین دو قسمت ایجاد می شود و هرگونه تغییر در حرکت توسط قسمت آزاد باعث اختلال در میدان مغناطیسی می شود.
INS از یک واحد اندازه گیری اینرسی (IMU)، الکترونیک پشتیبانی ابزار و رایانه های ناوبری برای محاسبه شتاب گرانشی تشکیل شده است. IMU ها معمولاً شامل سه ژیروسکوپ سرعت متعامد و سه شتاب سنج متعامد هستند که به ترتیب سرعت زاویه ای و شتاب خطی را اندازه گیری می کنند. این کامپیوترها همچنین شتاب خالص را یکپارچه می کنند تا تخمینی از موقعیت خودروی میزبان را حفظ کنند.
چه مزایا و معایبی دارند؟
سیستم های INS مستقل هستند و به کمک های خارجی یا شرایط دید متکی نیستند. این بدان معنی است که آنها می توانند در تونل ها یا زیر آب و همچنین در برنامه های پنهان کار کنند زیرا هیچ آنتن خارجی وجود ندارد که توسط رادار قابل تشخیص باشد. آنها برای ناوبری یکپارچه، هدایت و کنترل وسیله نقلیه میزبان مناسب هستند. IMU یک سیستم متغیرهایی مانند موقعیت، سرعت و ارتفاع را اندازه گیری می کند.
یکی از معایب سیستم های INS هزینه است، از جمله هزینه اکتساب، هزینه عملیات و هزینه نگهداری. از دیگر معایب می توان به افزایش خطاهای ناوبری در طول زمان و اتلاف گرما اشاره کرد. اندازه، وزن و توان مورد نیاز هنوز بیشتر از گیرندههای GPS است، اما با گذشت زمان و پیشرفت تکنولوژی در حال کاهش است.
مشخصات عملکرد
سیستم های ناوبری اینرسی به طور کلی به دو طرح مختلف تقسیم می شوند. طرح اول به صورت گیمبال یا تثبیت شده است که در آن سنسورهای اینرسی بر روی یک پلت فرم ثابت نصب شده و به صورت مکانیکی از حرکت چرخشی خودرو جدا می شوند. آنها معمولاً در سیستم هایی استفاده می شوند که به داده های ناوبری بسیار دقیق نیاز دارند، مانند کشتی ها و زیردریایی ها.
طرح دوم استراپ داون نامیده می شود زیرا حسگرها به طور سفت و سخت به بدنه خودروی میزبان متصل شده اند. مزایای این روش هزینه کمتر، کاهش اندازه و قابلیت اطمینان بیشتر است، اما نقطه ضعف آن افزایش پیچیدگی محاسباتی است.
مشخصات نرخ زاویه ای برای سیستم های ناوبری اینرسی شامل محدوده نرخ زاویه ای، پهنای باند، حساسیت عرضی و خطی بودن است.
محدوده سرعت زاویه ای حداکثر سرعت چرخشی است که ژیروسکوپ برای آن رتبه بندی می شود. اگر بتوان یک محصول یا سری را برای نرخ های مختلف پیکربندی کرد، آنگاه محدوده حداکثر فهرست شده است.
پهنای باند زاویه ای محدوده فرکانسی است که دستگاه قبل از خاموش شدن، مشخصات دقت را برآورده می کند. از آنجایی که ژیروسکوپ ها تقریباً همیشه قادر به پاسخگویی DC هستند، فقط نقطه پرتاب 3-dB با فرکانس بالا در آن گنجانده شده است.
حساسیت عرضی زاویه ای حداکثر سیگنال خروجی ناشی از چرخش حول یک محور متعامد به محور حساس مورد بررسی است. به صورت درصدی از سرعت زاویه ای ورودی متعامد بیان می شود.
خطی بودن زاویه ای یا خطی محور چرخشی در محدوده دمای عملیاتی به صورت درصد (±) از مقیاس کامل اندازه گیری می شود.
مشخصات اضافی برای سیستم های ناوبری اینرسی شامل وزن، حداکثر ابعاد و دمای عملیاتی است.
فن آوری های اندازه گیری
سیستم های ناوبری اینرسی از نظر انواع ژیروسکوپ و روش های اندازه گیری با هم تفاوت دارند.
انواع ژیروس
ژیروسکوپ ها حسگرهایی برای اندازه گیری چرخش هستند. ژیروسکوپ های نوری، جرم چرخشی یا ارتعاشی برای حس سرعت زاویه ای یا چرخشی استفاده می شوند.
ژیروسکوپ های نوری اجازه انعکاس اشعه لیزر را چندین بار در داخل یک محفظه می دهند.
ژیروهای جرمی در حال چرخش از جرمی با حرکت پیوسته با محور آزاد (گیمبال) استفاده می کنند.
ژیروهای ارتعاشی از فناوری سیستم میکروالکترو مکانیکی (MEMS) و یک چنگال تنظیم ارتعاشی کوارتز برای اندازهگیری نیروی کوریولیس استفاده میکنند.
چه راه هایی برای اندازه گیری شتاب خطی وجود دارد؟
اکثر سیستمهای ناوبری اینرسی جابجایی یک جرم ثابت را اندازهگیری میکنند.
دستگاه های مبتنی بر ظرفیت خازنی ظرفیت متغیر بین ساختار پشتیبانی و جرم اثبات را اندازه گیری می کنند.
دستگاههای تعادل تهی جرم را تقریباً در مرکز با بازخورد موقعیتی و مکانیزم سروو نگه میدارند.
حسگرهای موقعیت القایی دستگاه های غیر تماسی هستند که مختصات یک جسم (خطی یا زاویه ای) را با توجه به یک مرجع تعیین می کنند.
دستگاه های پیزوالکتریک یک ماده پیزوالکتریک را فشرده می کنند و باری تولید می کنند که توسط تقویت کننده شارژ اندازه گیری می شود.
هنگامی که مواد تحت فشار، تحت فشار یا انحراف قرار می گیرند، دستگاه های پیزومقاومت مقاومت را تغییر می دهند. دستگاه های تشدید کننده خروجی های تغییر فرکانس را ارائه می دهند.
گزینه های خروجی
انتخاب ها برای خروجی الکتریکی عبارتند از ولتاژ آنالوگ، حلقه جریان، پالس یا فرکانس، خروجی سوئیچ یا رله، خروجی سریال یا دیجیتال و شبکه/فیلدباس. خروجی های اضافی اندازه گیری میدان های مغناطیسی، دما و سرعت خطی را فراهم می کنند.
امکانات
برخی از سیستم های ناوبری اینرسی شامل ضبط کننده های داده یا ویژگی های سیستم موقعیت یابی جهانی (GPS) هستند.
استانداردها
سیستم های ناوبری اینرسی که مطابق با RoHS هستند، الزامات دستورالعمل محدودیت مواد خطرناک اتحادیه اروپا (EU) را برآورده می کنند. استانداردهای اضافی را می توان در فروشگاه استاندارد IHS یافت.
75-22-13 بعد از میلاد سیستم های ناوبری اینرسی\سیستم های لیتون.
FAA AC 25-4 سیستم های ناوبری اینرسی.
منبع: globalspec.com