سنسورهای موقعیت چرخشی
به روز رسانی شده در ۱۴۰۵/۴/۳۱ زمان مطالعه 6 دقیقه سنسورهای موقعیت چرخشی خروجی های الکتریکی را نسبت به چرخش شفت به منظور اندازه گیری دقیق زاویه ها ارائه می دهند. این دستگاه ها در کاربردهای سنجش موقعیت چندگانه استفاده می شوند، از جمله:
سنسورهای موقعیت چرخشی خروجی های الکتریکی را نسبت به چرخش شفت به منظور اندازه گیری دقیق زاویه ها ارائه می دهند. این دستگاه ها در کاربردهای سنجش موقعیت چندگانه استفاده می شوند، از جمله:
نمایش تمام سازندگان سنسورهای موقعیت چرخشی
موقعیت دنده
سنجش موقعیت خودرو، از جمله موقعیت دریچه گاز، موقعیت فرمان و موقعیت پدال
کنترل صنعتی
کنترل سوپاپ
کنترل دمپر HVAC
سنسورهای موقعیت چرخشی شبیه به انکودرهای دوار هستند، اما از این جهت تفاوت دارند که از رمزگذارهای دوار برای اندازهگیری تعدادی از چرخشهای کامل شده یک شفت استفاده میشود، در حالی که از سنسورهای موقعیت چرخشی برای اندازهگیری زاویه چرخش ناقص استفاده میشود.
انواع سنسورهای موقعیت روتاری
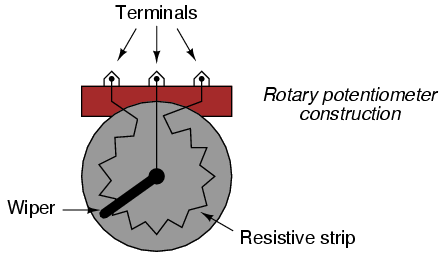
پتانسیومترهای چرخشی
پتانسیومترهای چرخشی از یک مسیر رسانا دایره ای و یک برف پاک کن الکتریکی متصل به شفت مرکزی تشکیل شده است. یک ولتاژ ثابت به مسیر اعمال می شود. با چرخش شفت و تماس برف پاک کن با مسیر، ولتاژ خروجی متناسب با زاویه شفت تغییر می کند. به این ترتیب پتانسیومترهای دوار از نظر فنی تقسیم کننده های ولتاژ تخصصی هستند. این دستگاهها معمولاً چرخش شفت 360 درجه را ارائه میکنند و میتوانند زاویه بیش از اکثر این چرخش را اندازهگیری کنند.
سنسورهای اثر هال
سنسورهای اثر هال برای موقعیت زاویه خروجی به اختلاف ولتاژ هادی نسبت به میدان مغناطیسی (همچنین به عنوان اثر هال شناخته میشود) متکی هستند. این حسگرها معمولاً از یک عنصر هال، یک شفت چرخان و یک آهنربا تشکیل شده اند. هنگامی که موقعیت زاویه ای عنصر تغییر می کند، تغییرات مربوطه در میدان مغناطیسی منجر به تغییر خطی در ولتاژ خروجی می شود.
یک سنسور اثر هال نسبت به یک شفت در حال چرخش.
سنسورهای اثر هال برای محیطهای سخت مناسبتر هستند، زیرا بر خلاف پتانسیومترها، به دلیل استفاده از میدان مغناطیسی، به تماس مستقیم الکتریکی وابسته نیستند. معایب استفاده از حسگرهای جلوه هال شامل تداخل بالقوه سیم های مجاور یا آهنرباهای دیگر است.
حسگرهای اندوکتانس متغیر شبیه به دستگاههای اثر هال هستند زیرا از یک میدان مغناطیسی در ارتباط با سیمپیچهای ثابت متعدد استفاده میکنند. با رفع عدم تعادل موجود بین سیم پیچ ها، سنسور موقعیت زاویه ای را تشخیص داده و خروجی می گیرد.
حل کننده ها
حل کننده ها شامل سه سیم پیچ هستند: یک سیم پیچ دوار (یا روتور) و دو سیم پیچ ثابت (یا استاتور) که 90 درجه از هم فاصله دارند. جریان از دو سیم پیچ ثابت عبور می کند. با مقایسه این دو جریان در رابطه با سیم پیچ دوار، رزولور می تواند موقعیت شفت را به طور دقیق تشخیص دهد. همانند سنسورهای اثر هال و اندوکتانس متغیر، تفکیککنندهها به میدانهای مغناطیسی متکی هستند و در معرض مزایا و معایب سایر سنسورهای مغناطیسی هستند.

یک حل کننده، با روتور حذف شده است.
سنکروها اساساً حلکنندههایی با چهار سیمپیچ کل هستند که شامل سه سیمپیچ ثابت با فاصله 120 درجه از هم هستند.
مشخصات
هنگام انتخاب سنسورهای موقعیت چرخشی، مهم است که مشخصات اندازه گیری مانند حداکثر زاویه، محدوده مکانیکی و دقت را در نظر بگیرید.
زاویه حداکثر به سادگی به بزرگترین زاویه ای که سنسور می تواند اندازه گیری کند اشاره دارد. به عنوان مثال، شفت یک دستگاه ممکن است بتواند یک دور کامل (یا 360 درجه) بچرخد، اما حداکثر زاویه دستگاه ممکن است تنها 348 یا 350 درجه باشد و 10 درجه چرخش شفت غیرقابل اندازه گیری باقی بماند. هنگام انتخاب سنسورهای موقعیت چرخشی، خریداران باید حداکثر زاویه را به عنوان محدوده مورد نظر از زوایای قابل اندازه گیری (یعنی 20 تا 340 درجه، و باید محدوده مکانیکی را به عنوان حداکثر مقدار منفرد زاویه قابل اندازه گیری (یعنی 350 درجه) مشخص کنند.
دقت به توانایی دستگاه در خروجی دقیق قرائت اشاره دارد و در درصد مثبت/منفی مقیاس کامل بیان می شود. خریداران باید محصولاتی را با درصد دقت پایین انتخاب کنند تا کارایی سنسور را به حداکثر برسانند.
سنسورهای موقعیت چرخشی ممکن است از یکی از چندین نوع خروجی الکتریکی برای رله کردن داده های موقعیت استفاده کنند.
جریان آنالوگ ممکن است نسبت به موقعیت زاویه ای بر مدار خروجی اعمال شود. دستگاه هایی که جریان آنالوگ خروجی دارند برای ارسال سیگنال های مسافت طولانی مفید هستند و گاهی اوقات فرستنده نامیده می شوند. خروجی جریان آنالوگ معمولاً به صورت محدوده ای مانند 0-20 میلی آمپر بیان می شود.
ولتاژ آنالوگ یک تابع خطی پیوسته از خروجی دستگاه است. مانند جریان آنالوگ، گاهی اوقات به عنوان یک محدوده ولتاژ بیان می شود.
خروجی های فرکانس آنالوگ از طریق برخی از انواع طرح های مدولاسیون، مانند مدولاسیون دامنه (AM) یا مدولاسیون فرکانس (FM) کدگذاری می شوند. به عنوان مثال می توان به شکل موج هایی مانند امواج سینوسی و موج های مربع اشاره کرد.
خروجی مقاومت بر حسب اهم (Ω) اندازه گیری می شود.
خروجی های دیجیتال شامل سیگنال های سریال و موازی است. سیگنال های سریال یک بیت در یک زمان ارسال می شوند و با استانداردهایی مانند RS-232، RS-422 و RS-485 نشان داده می شوند. در مقابل، ارتباط موازی شامل ارسال تعداد زیادی از اطلاعات به طور همزمان است.
منبع