وسایل نقلیه هدایت شونده خودکار
به روز رسانی شده در ۱۴۰۵/۴/۳۰ زمان مطالعه 4 دقیقهامروزه استفاده از رباتهای متحرک هدایت شونده خودکار یا وسایل نقلیه هدایت شونده خودران (Automated guided vehicle – AGVs) در صنایع مختلف به سرعت در حال گسترش میباشد. وسیله نقلیه هدایت شونده خودران به رباتی اطلاق میشود که قادر است به صورت خودران و بدون دخالت انسان در محیط به ناوبری و پیمایش مسیرهای از پیش تعیین شده بپردازد. کاربرد اصلی رباتهای AGVs در صنعت، حمل بار بین نقاط مختلف است. از این رباتها در صنایع مختلف از جمله انبارداری، حمل مرسولات پستی درون شهری، رستورانها، فروشگاههای زنجیرهای و … و بسیاری از مکانها و صنایعی که انجام کارهای پرتکرار برای انسان سخت و خستهکننده میباشد استفاده میشود.
۲- نمونه رباتهای AGVs تجاری شده در دنیا
۲–۱– ربات چاک (Chuck)
شرکتهای زیادی در سرتاسر دنیا در حال توسعه، تجاریسازی و عرضه وسایل نقلیه هدایت شونده خودران (AGVs) میباشند. یکی از این رباتها با نام تجاری چاک (Chuck) ساخت شرکت 6 RIVER SYSTEMS میباشد که از تکنیکهای یادگیری ماشین و هوش مصنوعی به منظور ناوبری (Navigation) در محیط هدف استفاده میکند. نمونههایی از این ربات AGV در شکل ۱ نمایش داده شده است.
ربات چاک همانند خودروهای خودران با استفاده از دوربین و سنسور لیدار با اسکن محیط و بدست آوردن ابرنقاط، نقشه محیطی که قرار است در آن ناوبری داشته باشد را بدست آورده و بدون نیاز به هیچ گونه تغییرات ساختاری در محیط، قادر به فعالیت میباشد. این وسیله نقلیه هدایت شونده خودران توانایی تعامل با انسان را دارا میباشد (Human-robot interaction). به عنوان مثال میتواند در یک فروشگاه زنجیرهای مشتری را به سمت کالای مورد نظر خود هدایت کند.

شکل ۱: ربات Chuck
۲–۲– ربات آجیلاکس (Agilox)
ربات خودران هوشمندی که در شکل ۲ نمایش داده شده است ساخت شرکت Agilox میباشد. این ربات سری پیشرفته تری از رباتهای AGV با نام IGV یا Intelligent Guided Vehicle میباشد. رباتهای آجیلاکس براساس هوش جمعی (Swarm Intelligence) طراحی شدهاند بدین معنی که میتوانند علاوه بر اینکه به صورت کاملا مستقل عمل نمایند، در یک محیط کاملا تعاملی و بدون نیاز به کنترلر خارجی با یکدیگر تعامل و تبادل اطلاعات کنند و اطلاعات محیط و سفارشات ثبت شده را با یکدیگر به اشتراک بگذارند. از این ربات در سیستمهای انباریداری بزرگ استفاده میشود که نیازمند تبادل حجم زیادی از کالاها در مسیرهای متنوع میباشد.

شکل ۲: ربات AGILOX
۲–۳– ربات ASTI
از ربات هدایت شونده خودکار ATSI میتوان برای حمل کالاها در انبارها و کارخانهها استفاده نمود. ربات ATSI را میتوانید در شکل ۳ مشاهده نمایید.

شکل ۳: ربات ASTI
۳- اجزای مختلف ربات هدایت شونده خودران
شکل ۴ قسمتهای اصلی یک ربات هدایت شونده خودکار را نمایش داده است. ربات شکل ۴ از اجزای زیر تشکیل شده است.
۱- چرخهای اکتیو: در وسط و دو طرف ربات دو عدد چرخ قرار دارد که به موتور الکتریکی متصل شدهاند از این رو به آنها چرخهای اکتیو میگویند چراکه نیروی حرکتی ربات را تامین مینمایند.
۲- چرخهای پسیو: در جلو و عقب ربات ۴ عدد چرخ قرار دارد که تنها وظیفه نگه داشتن ربات را برعهده دارند و به صورت هرزگرد میباشند از این رو به آنها چرخهای پسیو اطلاق میشود.
۳- درایور موتور: درایور موتور وظیفه کنترل گشتاور و سرعت موتورها را برعهده دارد که به صورت مستقیم از کنترلر مرکزی فرمان میگیرد. شرکت ربات سازان با بیش از ۷ سال فعالیت در حوزه طراحی و ساخت انواع درایورهای موتورهای الکتریکی دو عدد محصول با نامهای PMD90 و AMD60 تجاری سازی کرده است که انتخابهای مناسبی برای راه اندازی موتورهای الکتریکی در رباتهای هدایت شونده خودکار میباشند. لازم به ذکر است که شرکتهایی همچون حک فلز مشهد، سایپا سیتروئن و … جهت طراحی و ساخت رباتهای هدایت شونده خودکار خود از این محصولات استفاده میکنند و از مشتریان شرکت ربات سازان میباشند.
۴- باتریها: باتریها وظیفه تامین انرژی لازم جهت حرکت ربات را برعهده دارند. مطابق شکل ۴ باتریها به صورت متقارن در جلو و عقب ربات قرار گرفتهاند تا باعث نگه داشتن مرکز ثقل ربات در مرکز و روی چرخهای اکتیو شوند.
۵- سیستم مدیرت شارژ باتریها یا BMS: سیستم مدیریت شارژ باتری یا BMS با مدیریت و مانیتور کردن باتریهای قابل شارژ باعث عملکرد ایمن و بهینه آنها میشود. بی-ام-اس با مانیتور کردن ولتاژ، جریان، دما و توان مصرفی هر یک از باتریها (یا سلولها در باتریهای لیتیوم) وظیفه شارژ و دیس شارژ کل پک باتری را برعهده دارد. از آنجایی که در یک پک باتری، باتریها به صورت سری -موازی قرار گرفتهاند، BMS با اندازهگیری ولتاژ، جریان و دمای هر سلول و ارسال آنها به کنترلر مرکزی هر گونه خرابی در پک باتری را تشخیص میدهد.
۶- سنسور هدایت مغناطیسی: سنسور هدایت مغناطیسی وظیفه تشخیص مسیر مغناطیسی تعبیه شد در کف محیطی که قرار است ربات در آن پیمایش کند را برعهده دارد. با استفاده از این سنسور ربات در مسیرهای از پیش تعیین شده پیمایش میکند. انواع مختلف دیگری از سنسورها و دوربینها در رباتهای هدایت شونده خودکار به کار گرفته میشوند که در ادامه مقاله به تشریح آنها خواهیم پرداخت.
۷- کنترلر مرکزی: کنترلر مرکزی با برقراری ارتباط با کلیه المانها و سنسورها ربات وظیفه کنترل و هدایت ربات را برعهده دارد.
۸- شاسی ربات: کلیه چرخها و باتریها و سایر ادوات الکترونیکی بر روی شاسی ربات نصب میشوند. شاسی ربات از متریالهای سخت و سبک به منظور افزایش استحکام و کاهش وزن ربات ساخته میشود.
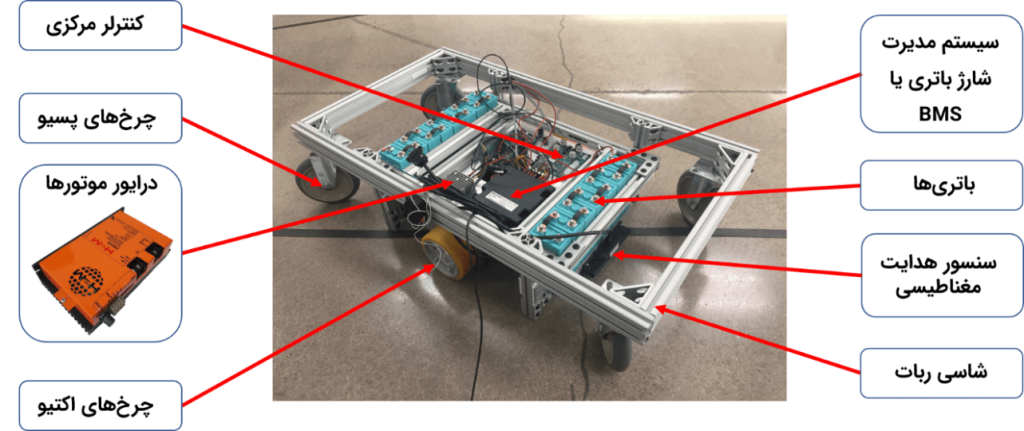
شکل ۴: اجزای اصلی ربات هدایت شونده خودران
شکل ۴ اجزای اصلی یک ربات AGV ساده را نشان داده است. در رباتهای پیشرفتهتر از انواع مختلفی دیگری از اجزا و سنسورها جهت ناوبری ربات در محیط استفاده میشود.
۴- انواع روشهای ناوبری و هدایت رباتهای AGVs
رباتهای هدایت شونده خودکار از روشهای مختلفی به منظور ناوبری در محیط بهره میگیرند که در ادامه به توضیح رایج ترین روشهای ناوبری رباتهای AGVs میپردازیم.
۴–۱– ناوبری به روش لیزری (Laser Navigation)
روش ناوبری لیزری براساس اصل مثلثبندی (triangulation) عمل مینماید. به این صورت مطابق شکل ۵ یک سری صفحات انعکاس دهنده (شبیه آینه) در محیطی که قرار است ربات AGV در آن ناوبری کند نصب میشوند. سپس ربات با انتشار اشعههای لیزری به سمت آنها و دریافت اشعه بازتابیده شده با اندازهگیری زوایه بین آنها موقعیت ربات را در محیط تخمین زده و عملیات ناوبری را انجام میدهد.
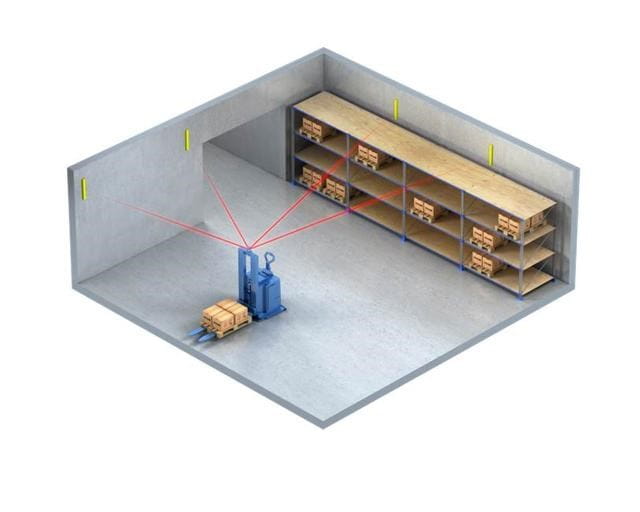
شکل ۵: ناوبری ربات AGV به روش Laser Navigation
در جدول ۱ مزایا و معایت ناوبری رباتهای AGVs به روش لیزی آورده شده است.
ول ۱: مزایا و معایت ناوبری به روش لیزی
مزایا | معایب |
| دقت بالا | حساس به نور خورشید |
| قابلیت ناوبری با سرعت بالاتر | هزینه بالای تجهیزات و صفحات انعکاس دهنده |
| قابلیت تغییر مسیر حرکت بدون نیاز به تغییرات محیطی | تنها برای محیطهای بدون مانع کارایی دارد |
۴–۲– ناوبری از طریق نصب نوارهای مغناطیسی (Magnetic Tape Navigation)
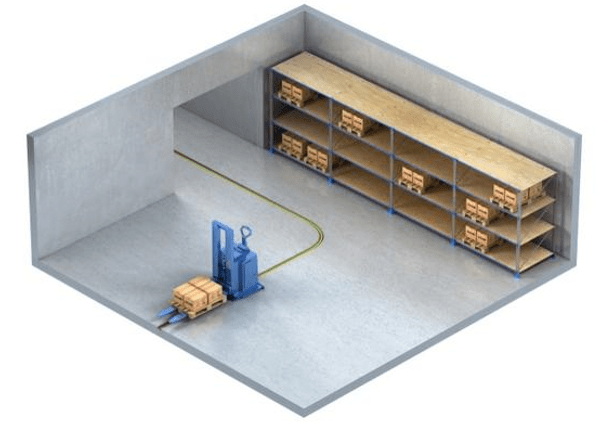
در این روش با نصب نوارهای مغناطیسی در کف محیط امکان ناوبری در مسیرهای از پیش تعیین شده فراهم میشود. ربات AGV با دریافت سیگنالهای مغناطیسی القایی از نوار به وسیله سنسور مغناطیسی تعبیه شده بر روی ربات، عملیات دنبال کردن مسیر مغناطیسی را انجام میدهد.
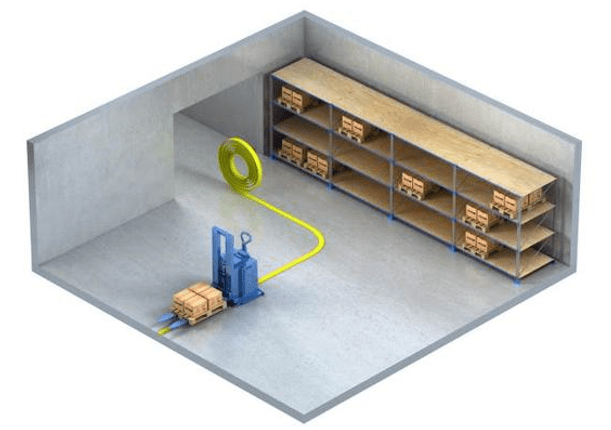
شکل ۶: ناوبری به روش Magnetic Tape Navigation
جدول ۲: مزایا و معایت ناوبری به روش نصب نوار مغناطیسی
مزایا | معایب |
| سادگی نصب با استفاده از حداقل تجهیزات | از آنجاییکه نوارها در معرض محیط قرار دارند امکان آسیب مکانیکی و آلودگی وجود دارد |
| عدم تاثیر پذیری از نور و صدای محیط | برای جلوگیری از رد شدن ربات از روی نوار در گوشهها باید نوار را به صورت ناپیوسته نصب کرد که این خود باعث کاهش پایداری در ناوبری میشود. |
| به راحتی میتوان مسیرها را اصلاح کرد و یا گسترش داد | نوارها باعث جذب مواد مغناطیسی اطراف به خود میشوند. |
۴–۳– ناوبری از طریق نصب میخهای مغناطیسی در زیر کف محیط (Magnetic Nail Navigation)
میخهای مغناطیسی شبیه نوارهای مغناطیسی کار میکنند با این تفاوت که آنها در زیر کف محیط نصب میشوند. روش ناوبری نیز مشابه روش ناوبری با نوار مغناطیسی میباشد با این تفاوت که در روش ناوبری با نوار تشخیص به صورت متناوب بوده ولی در روش ناوبری با میخ مغناطیسی تشخیص باید به صورت پیوسته انجام شود. بنابراین فاصله بین میخها نباید بیش از حد زیاد باشد. معمولا در این روش فاصله بین میخها به صورت پیوسته اندازهگیری میشود بنابراین این روش نیازمند نصب انکودر بر روی چرخها میباشد.
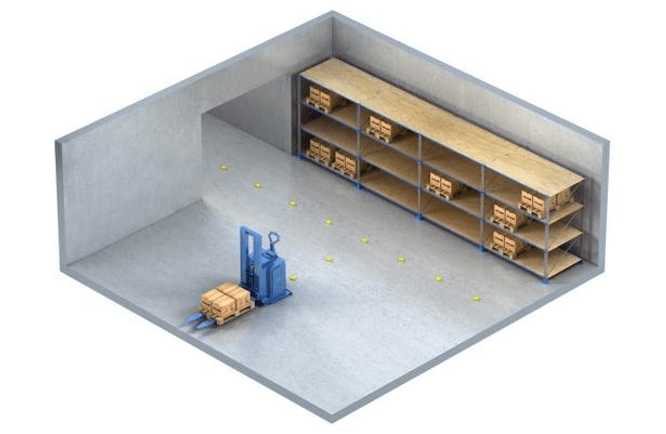
شکل ۷: ناوبری به روش Magnetic Nail Navigation
جدول ۳: مزایا و معایت ناوبری به روش نصب میخهای مغناطیسی
مزایا | معایب |
| هزینه پیاده سازی کم | آسیب زدن مکانیکی به کف محیط |
| نصف میخها در زیر زمین | دشواری اصلاح و گسترش مسیرها |
| میخهای مغناطیسی در برابر اسید، روغن و … مقاومت هستن و میتوان از این روش در کاربردهای محیط باز نیز استفاده کرد | تاثیر پذیری از مواد مغناطیسی پیرامون |
۴–۴– ناوبری الکترومغناطیسی (Electromagnetic Navigation)
ناوبری الکترومغناطیسی جزء روشهای ناوبری سنتی و قدیمی است. این روش ناوبری در محیطهایی با شرایط کاری خاص استفاده میشود. از جمله در محیطهایی که نیازمند ناوبری در مسیرهای تنگ، ناوبری در محیطهای با دمای بالا و ناوبری در مسیرهایی که نیازمند پیماش کاملا مستقیم هستند استفاده میشود. در این روش سیمهایی فلزی در زیر کف قرار میگیرند و به وسیله یک مولد فرکانس یک فرکانس هدایتی الکترومغناطیسی در طول مسیر تولید میکنند. سنسور تعبیه شده بر روی ربات AGV سیگنال با فرکانس هدایتی مورد نظر را دریافت کرده و از آن برای ناوبری استفاده میکند.
شکل ۸: ناوبری به روش الکترومغناطیسی
جدول ۴: مزایا و معایت ناوبری به روش نصب میخهای مغناطیسی
مزایا | معایب |
| هزینه پیاده سازی کم | نیازمند تجهیزات برای تولید سیگنال الکترومغناطیسی |
| ناوبری با دقت بالا | آسیب رساندن به کف محیط |
| مناسب برای کاربردهای داخلی و یا محیط باز | دشواری اصلاح و گسترش مسیرها |
۴–۵– ناوبری به روش رینجینگ (Ranging Navigation)
در این روش ناوبری، ربات AGV با استفاده از یک اسکنر لیزری دو بعدی و یا سه بعدی (سنسورهای LiDAR) محیط اطراف خود را اسکن کرده و در هر لحظه یک ابر نقاط از محیط ایجاد میکند. سپس ربات با استفاده از این ابر نقاط و به کارگیری الگوریتمهای Navigation به ناوبری در محیط میپردازد. از انواع روشهای هوش مصنوعی، یادگیری ماشین، یادگیری عمیق و … به منظور ناوبری خودران ربات در محیط استفاده میشود.
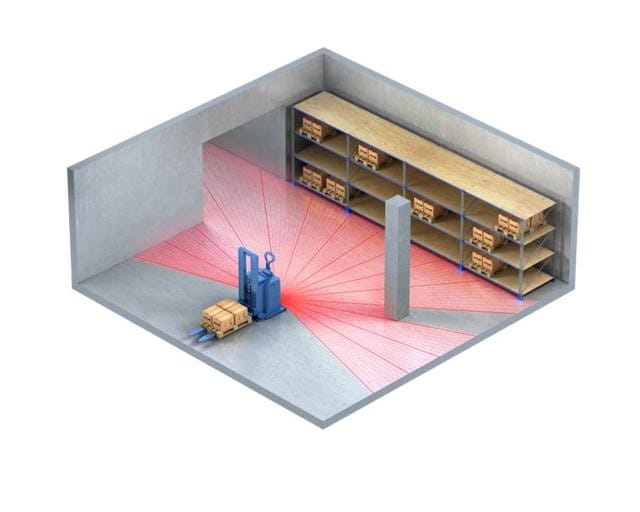
شکل ۹: ناوبری به روش رینجینگ
جدول ۵: مزایا و معایت ناوبری به روش رینجینگ
مزایا | معایب |
| نیازی به صفحههای انعکاس دهنده و سایر مارکرهای مصنوعی ندارد | گران بودن اسکنرهای ۲ بعدی و ۳ بعدی در حال حاضر |
| کاهش زمان نصب و پیاده سازی | |
| عدم صدمه زدن به محیط |
۴–۶– ناوبری به روش طبیعی و با استفاده از دوربین و سنسور لیدار
در ناوبری به روش طبیعی ربات با استفاده از اسکنرهای لیداری و دروبینها موقعیت محلی خود را در نقشه مجازی از پیش برنامه ریزی شده برروی ربات پیدا کرده و به کمک انواع الگوریتمهای هوش مصنوعی و یادگیری ماشین مسیر هدف را دنبال کرده و به ناوبری در محیط میپردازد.
۴–۷– ناوبری هایبرید
در روش ناوبری هایبرید از ترکیب چند روش ناوبری ذکر شده در بالا به منظور ناوبری در محیط استفاده میشود. معمولا رباتهای پیشرفته از روش ناوبری هایبرید استفاده میکنند.
۵- انواع مکانیزمهای هدایت و فرمان در رباتهای خودران
به طور کلی چهار روش پایه به منظور درایو و هدایت رباتهای AGVs وجود دارد.
۵–۱– درایو و هدایت به وسیله چهار چرخ اکتیو
در روش اول که در شکل ۱۰ نمایش داده شده است از چهار چرخ اکتیو (به چرخی که به یک موتور الکتریکی متصل است چرخ اکتیو میگویند.) به منظور درایو و هدایت ربات استفاده میشود. در این روش ربات میتواند در جا گردش کرده و کمترین فضا را به منظور دور زدن اشغال میکند. این روش نیازمند ۴ موتور الکتریکی میباشد که باید به صورت مستقل به هر یک از چرخها متصل شوند.
شکل ۱۰: درایو و فرمان از طریق چهار چرخ اکتیو معمولی
همچنین در رباتهای AGVs پیشرفتهتر به جای چهار چرخ معمولی از چهار چرخ مکانوم استفاده میشود. برای آشنایی با مکانیزم چرخ مکانوم به مقاله آموزشی «کنترل چرخ مکانوم» مراجعه فرمایید. در این روش درایو و هدایت که در شکل ۱۱ نشان داده شده است ربات قادر است بدون تغییر جهت راستای خود در جهتهای مختلف به ناوبری بپردازد. از این روش در مکانهایی که به شدت محدودیت فضا دارند استفاده میشود.
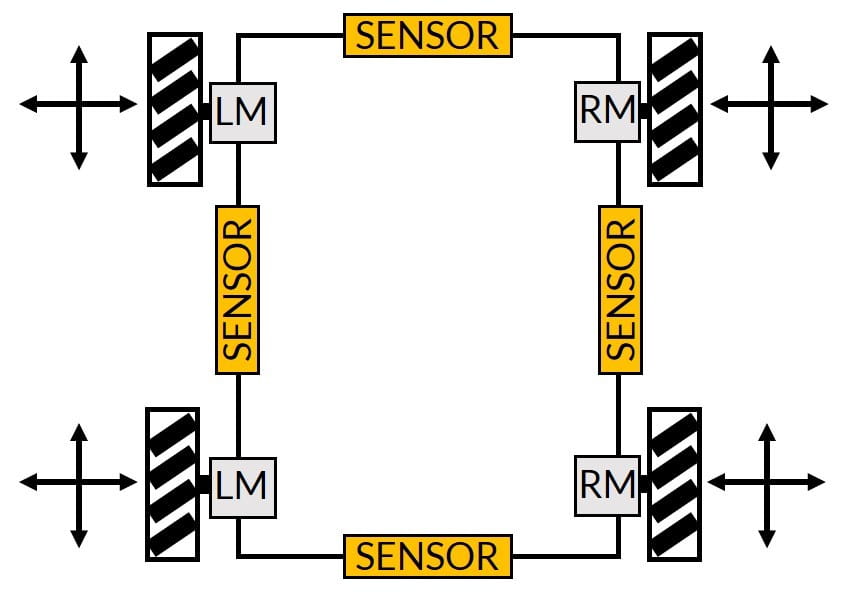
شکل ۱۱: درایو و فرمان از طریق چهار چرخ اکتیو معمولی
یکی از رباتهای تجاری ساخته شده به روش درایو و هدایت به وسیله چرخ مکانوم، ربات غول پیکر شرکت KUKA میباشد که از آن برای حمل قطعات هواپیما و سایر قطعات در سولههای بزرگ استفاده میشود. در این ربات به منظور تحمل وزن بیشتر از تعداد بیشتری چرخ مکانوم استفاده شده است.

شکل ۱۲: ربات شرکت KUKA با سیستم درایو و هدایت با چهار چرخ مکانوم
۵–۲– درایو و هدایت به وسیله ۲ چرخ اکتیو و ۴ چرخ پسیو
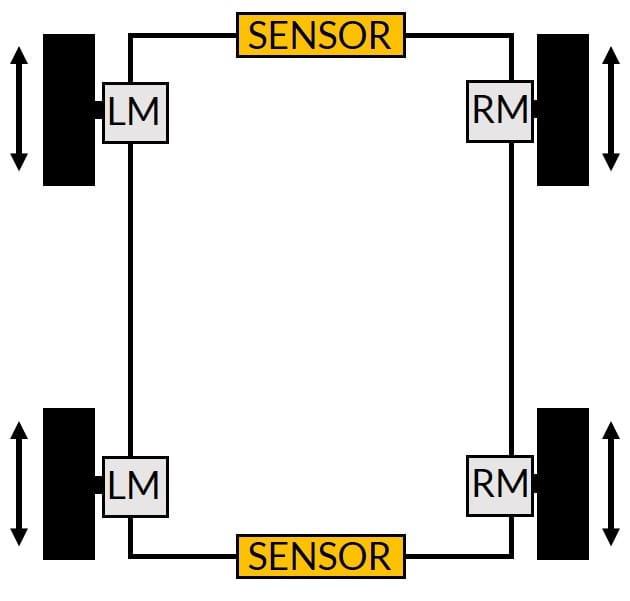
در این روش درایو و هدایت که در شکل ۱۳ نمایش داده شده است از ۲ چرخ اکتیو در مرکز ربات و ۴ چرخ پسیو (چرخ هرزگردی که به موتور الکتریکی متصل نیست) در جلو و عقب ربات استفاده شده است. در این روش درایو و هدایت نیز ربات قادر است حول مرکز خود دوران نماید.
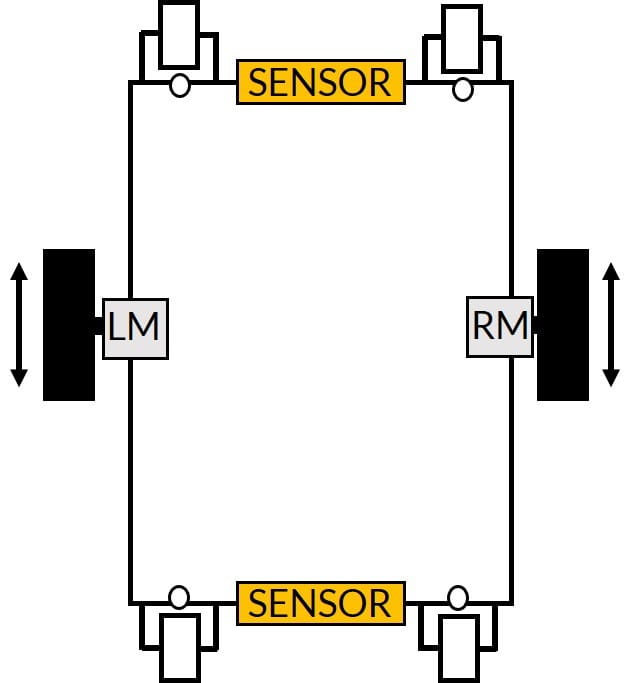
شکل ۱۳: روش درایو و هدایت به وسیله ۲ چرخ اکتیو و ۴ چرخ پسیو
ربات شکل ۱۴ ساخت شرکت Roboteq از این مکانیزم درایو و هدایت پیروی میکند.
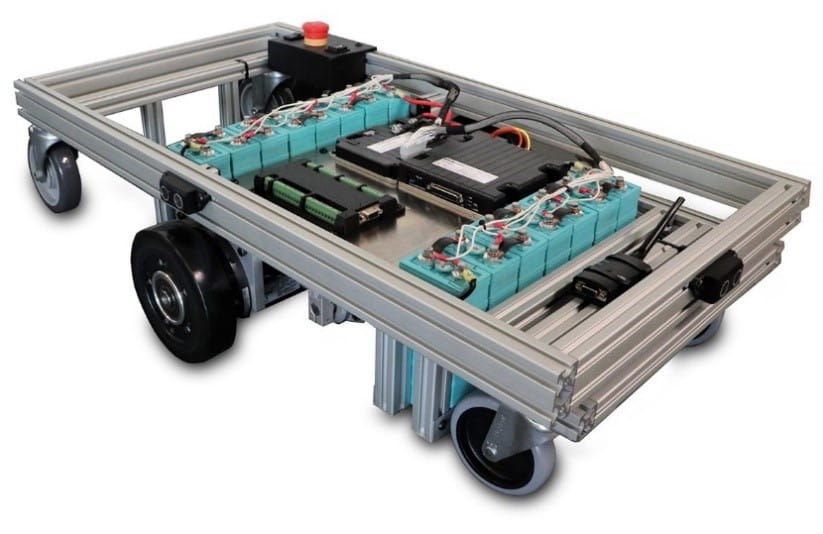
شکل ۱۴: ربات شرکت Roboteq با مکانیزم درایو و هدایت به وسیله دو چرخ فعال و چهار چرخ پسیو
به عنوان روشی جایگزین و سادهتر در برخی از رباتها از دو چرخ اکتیو در جلوی ربات و دو چرخ پسیو در عقب ربات استفاده میشود که این روش درایو و هدایت در شکل ۱۵ نمایش داده شده است.
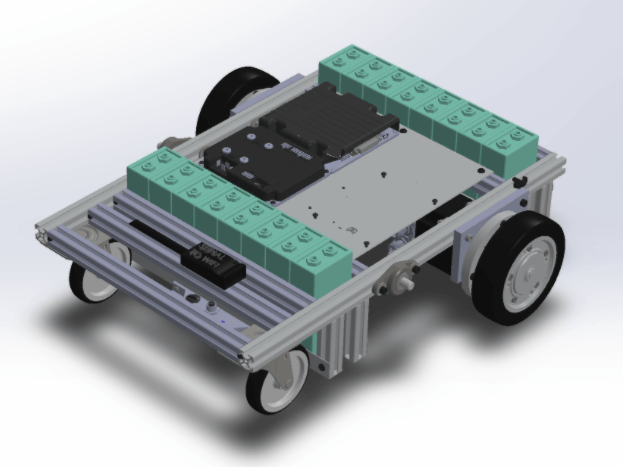
شکل ۱۵: ربات شرکت Roboteq با مکانیزم درایو و هدایت به وسیله دو چرخ فعال و دو چرخ پسیو
۵–۳– درایو و هدایت به وسیله یک چرخ اکتیو فرمان پذیر و دو چرخ پسیو
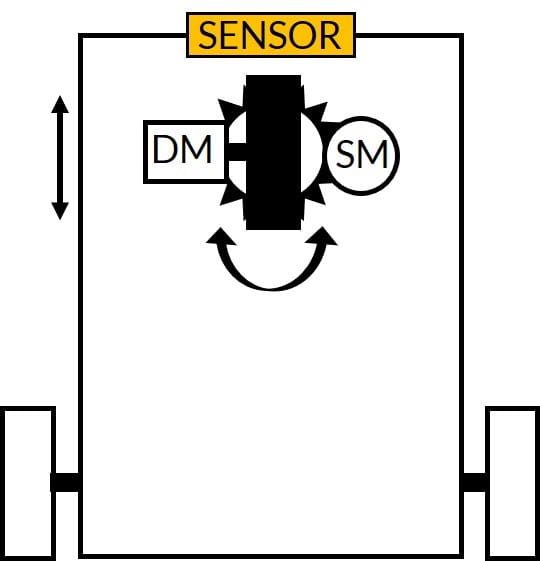
در این روش با استفاده یک چرخ اکتیو Steerable عملیات درایو و هدایت ربات AGV انجام میشود. چرخ Steerable که مکانیزم آن در شکل ۱۶ نمایش داده شده است قادر است علاوه بر چرخش حول محور موتور، حول محور عمود بر موتور نیز دوران کند.

شکل ۱۶: مکانیزم چرخ Steerable
روش درایو و هدایت با استفاده از یک چرخ اکتیو Steerable و دو چرخ پسیو در شکل ۱۷ نمایش داده شده است.
شکل ۱۷: روش درایو و هدایت به وسیله یک چرخ اکتیو فرمان پذیر و دو چرخ پسیو
۵–۴– درایو و هدایت به وسیله دو چرخ اکتیو کوپل شده به یک موتور در عقب ربات و دو چرخ کوپل شده Steerable در جلوی ربات
این روش شبیه روش درایو و هدایت در وسایل نقلیه رایج میباشد. نیروی پیش ران ربات از طریق دو چرخ کوپل شده به یک موتور الکتریکی در عقب ربات تامین میشود. همچنین به وسیله دو چرخ کوپل شده پسیو در جلوی ربات عملیات هدایت صورت میپذیرد. این مکانیزم درایو و هدایت در شکل ۱۸ نمایش داده شده است.
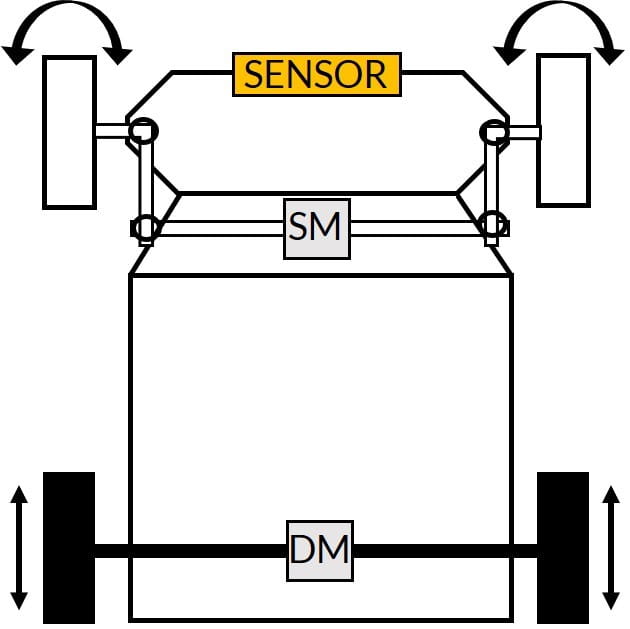
شکل ۱۸: درایو و هدایت به روش رایج در وسایل نقلیه
منبع: chinatransfercart